BLMC - SL - 30A BEC 5V 1,5A (3A)
За основу взята схема с сайта: http://www.jetcontrol.de/Bastelstube/BLMC.html Технические характеристики: Питание: 2-3Li-Po, до 10 Ni-Cd Максимальный безопасный кратковременный ток - 20А Максимальный импульсный ток (мкс) - 140А Тайминг (30гр. - 0гр. - автотайминг) 7 положений ШИМ - 4кГц (возможно править в еепроме) Тормоз (вкл. и выкл.) BEC 5V 1A (при использовании LM2940) BEC 5V 1.5A (при использовании L4941, 78D05), дополнительно можно установить ещё один стабилизатор, идея как это сделать есть в описании. Максимальная нагрузка: бесколлекторный двигатель постоянного тока без датчиков (9-12 полюсов 10-16 магнитов) Kv:600-1000 расчитанный на винт 11*6. Рекомендуемая нагрузка: бесколлекторный двигатель постоянного тока 12 полюсов 10 магнитов, Kv-750 расчитанный на нагрузку 11*6. Ток потребления такого двигателя при питании 3 Li-Po составит порядка 16-18А. p.s Выходной каскад электрически на плате изолирован через предохранитель. Если по какой-то причине выходной каскад выйдет из строя - предохранитель перегарает, при этом питание стабилизатора сохранится, и модель находясь в воздухе, продолжит управляемый полёт, и с большой вероятностью при благопритяных условиях спланирует на "удачную" посадку. К тому же сохранится в целостности силовой аккумулятор, и регулятор хода. Использовать только на радиоуправляемых моделях или на беспилотных летательных аппаратах!
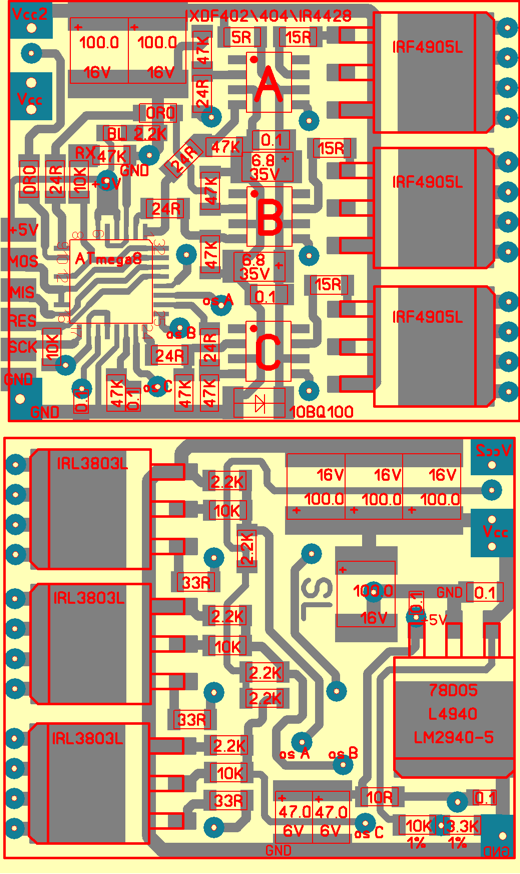
Директория для прошивки (hex и eeprom) тут... Описание в pdf (2,93Mb) тут... Сборочные чертежи лицевой и обратной стороны выполненные в SP5 здесь... Оригинал платы в SP5 тут... Видео работы (5Mb) можно скачать тут...
Удачи! И если что непонятно пишите на почту (справо вверху значки). |
{kind=link}
Содержание странички... |
||
|
Для начала выложена инфа по P-N вариантам BLMC-SL-15A, BLMC-SL-30A, BLMC-SL-40A, BL-BLMC-SL10A, BL-BLMC-SL15A, BL-BLMC-SL30A и др. В дополнение более менее подробное описание в pdf, видео работы (можно скачать), прошивки, схемы, платы и т.п |
||
© 2009 SL-Электорника. Бесплатная заготовка шаблона html взята с сайта AnVisionWebTemplates.com.